新闻分类


更多产品分类
站内搜索 更多友情链接 商家通 通天下
想拥有精美网站和更多的询盘订单?立即注册升级为商家通会员!生意旺旺!需要帮助欢迎与我们取得联系。
|
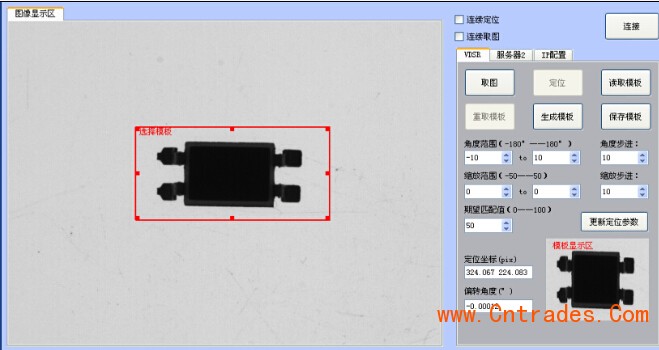
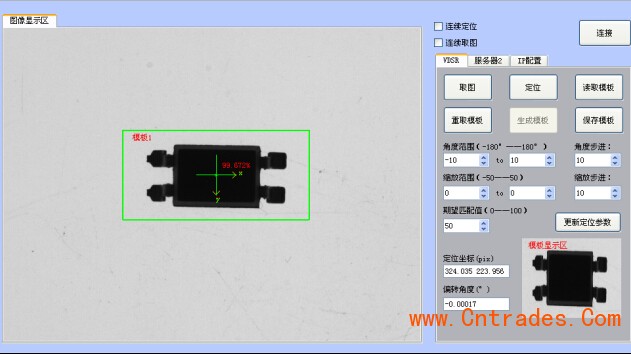
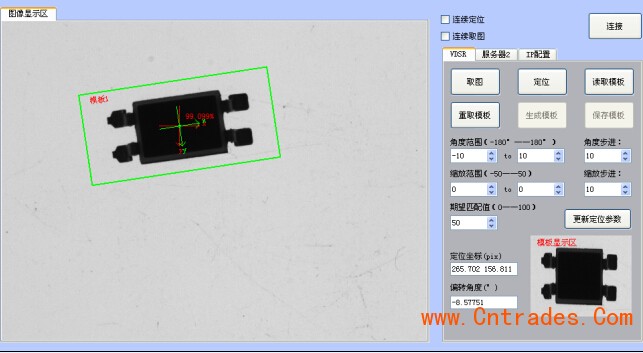
新闻分类 新闻中心 VDSR智能相机定位案例发布时间:2015-12-12 16:35:03 返回列表
VDSR智能相机定位案例http://robovimo.ceoie.com/news/itemid-1370278.shtml,我们主要有模具保护器,机器人,光源,欢迎与我联系:联系人,尹女士,手机:18033445254,我将向您提供更多【VDSR智能相机定位案例】详细信息。 |